

In my continued exploration of the 5 Key Indicators for Edge AI—Bandwidth, Latency, Economics, Reliability, and Privacy—I want to highlight Economics as a critical success factor for humanoid robots. Specifically, I’m referring to energy efficiency for Economics Indicators, it is a fundamental driver of chip innovation and a decisive metric for sustainable development, too. Energy efficiency has always been a pivotal benchmark in semiconductor design. As we approach the physical limits of clock speed, the industry’s focus has shifted to optimizing power consumption. Companies like Qualcomm, leveraging ARM’s inherently energy-efficient architecture, have put immense competitive pressure on traditional x86 players like Intel and AMD. Similarly, in the electric vehicle (EV) industry, energy efficiency is considered the ultimate measure of success.
Two Pillars of Energy Efficiency
When tackling energy efficiency, two primary strategies come into play:
- Increasing Energy Storage Density: Enhancing battery capacity within a compact volume.
- Power Saving: Reducing energy consumption, aligned with the principle of “broadening sources of income and cutting expenditure.”
While breakthroughs in energy storage are primarily driven by advances in material science—a topic beyond this discussion—this article focuses on power saving and reducing energy consumption in humanoid robots.
Learning from the Notebook Industry
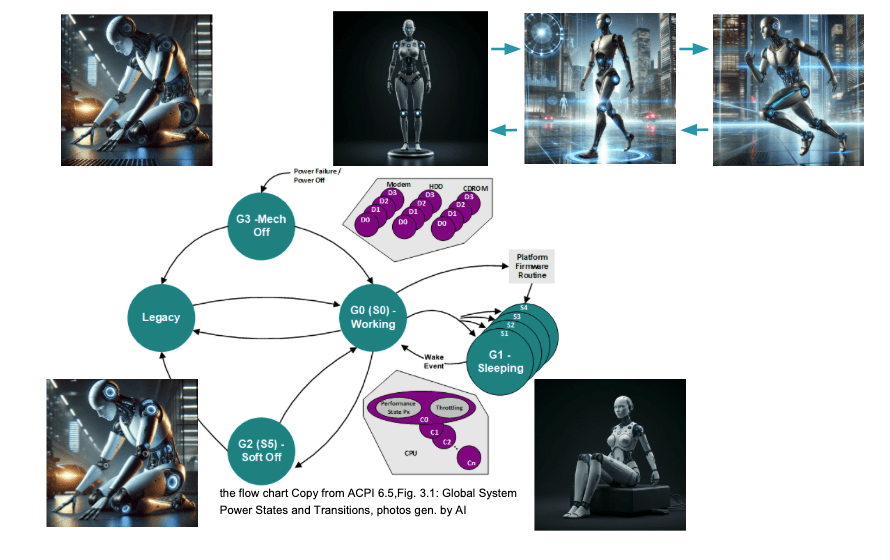
The notebook industry provides a proven model for energy optimization through the ACPI (Advanced Configuration and Power Interface) architecture, defined within UEFI Forum (Unified Extensible Firmware Interface forum). ACPI standardizes such as boot operations, performance management, and power states like Working, standby, Sleeping states, and soft-off or Mach-off devices. These protocols form the backbone of energy-efficient computing, enabling seamless power management across devices.
Humanoid robots, in my view, require a similar foundational framework to drive their development ecosystem. While these robots will demand additional specialized subsystems, an extended and customized version of ACPI could serve as a vital starting point for regulating their energy efficiency. History demonstrates that standardized frameworks are essential for industry growth. The personal computer revolution was fueled by Coopetition (競合 cooperation +competition), balance of competition and collaboration under shared protocols. A unified architecture for humanoid robots could replicate this success, fostering an environment where innovation thrives and developers work toward shared goals. By establishing energy-efficient frameworks early, we can accelerate the maturity of humanoid robot development. This isn’t just about creating individual devices—it’s about building a vibrant, competitive ecosystem that prioritizes sustainability and collaboration.
電力:人形機器人發展成功的基石
在我持續探討 Edge AI 五大關鍵指標——頻寬(Bandwidth)、延遲(Latency)、經濟性(Economics)、**可靠性(Reliability)與隱私(Privacy)**的過程中,這次我想強調「經濟性」是人形機器人成功發展的關鍵因素之一。特別是其中的「能源效率」,不僅是晶片創新驅動的核心指標,也將是永續發展的決定性標準。
能源效率自始至終都是半導體設計中的關鍵基準。隨著時脈速度逐漸逼近物理極限,產業的焦點已轉向最佳化電力消耗。像是 Qualcomm 利用 ARM 天生具備的高能效架構,對傳統 x86 陣營如 Intel 和 AMD 構成巨大競爭壓力。在電動車產業中,能源效率同樣被視為最終的成功標竿。
我認為人形機器人也需要一個類似的基礎框架來驅動其發展生態系。雖然這些機器人會需要額外的專用子系統,但若能擴展並客製化現有的 ACPI(Advanced Configuration and Power Interface) 規範,便可能成為規範其能源效率的核心起點。歷史證明,標準化框架對產業成長至關重要。個人電腦革命正是建立在「競合(Coopetition)」的基礎上——在共享協定下,競爭與合作達到平衡。若人形機器人能建立起統一的架構,也將有望重現當年 PC 的產業奇蹟,催生創新、吸引開發者共同投入、並加速整體產業成熟。
我們不是只在打造單一設備,而是建立一個具有競爭力且強調永續與協作的產業生態系統。
能源效率的兩大支柱:
探討能源效率時,有兩個主要策略:
- 提升能源儲存密度:在有限體積內提升電池容量。
- 降低耗能(節能):透過電源管理達成「開源節流」的目標。
儲能密度的突破主要依賴材料科學的進展(這部分超出本文範疇),因此本文將聚焦在第二項——節能與降低耗電,並探討其在發展人形機器人時的應用。
向筆記型電腦產業學習節能設計
筆電產業早已透過 ACPI 架構 展現出節能優化的成熟典範。ACPI 是由 UEFI Forum(統一可擴展韌體介面論壇) 所制訂的架構,負責定義如開機流程、效能管理、與各種電源狀態(如運作中、待機、睡眠模式、以及軟關機或機構關閉狀態)等標準作法。
這些協定正是能效運算的核心,讓設備之間能夠無縫協作、共享資源並有效管理電力。在設計人形機器人時,若能以 ACPI 為基礎延伸出適用於 AI 子系統、感測模組、行走機構等的電源管理架構,將有助於打造真正高效、永續且具有商業規模的未來機器人系統。





發表留言